Vibration damping for robots with compliant structures
VR/Multi-view mobile teleoperation with haptic feedback
Workshop on the Talos humanoid robot
Series elastic robot walking over obstacles
Humanoid Robots in Aircraft Manufacturing
Enhancing Series Elastic Actuators with Damping
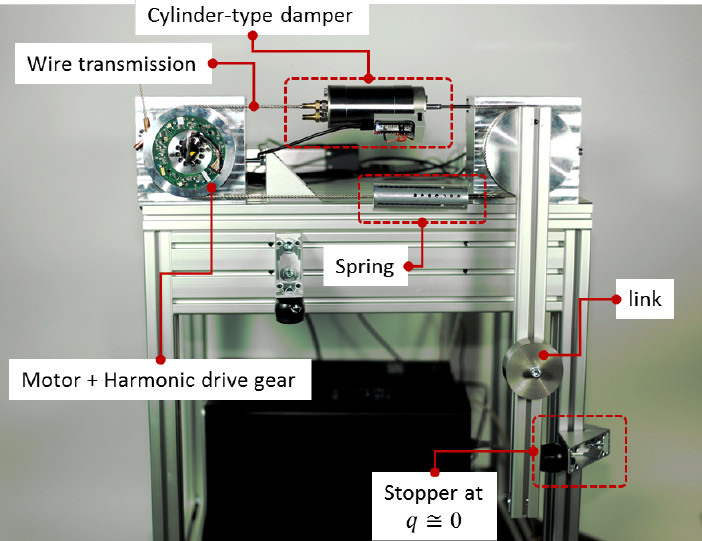
Test setup for new spring damper component.
C-Runner: Dynamic Walking Experiments
C-Runner: Concept and Design
Multi-Contact Planning and Control
C-Runner: First Walking Experiments
Picking Objects from a Table
Generalization of Optimal Walking Trajectories
Control Applications of Toro
Robotics Library
The library
implements the basic building blocks for robotics research:
Forward kinematics and associated Jacobians
Computation of matrix quantities for the robotic equation of motion,
including time derivatives up to the second order
Recursive forward and inverse dynamics (including constraints)
Collision computation for primitives: Sphere, Capsule, Box based
on quadratic optimization
Realistic non-linear contact model
Self-collision avoidance for torque controlled robots using
potential fields
Limited inverse kinematics solver
OpenSceneGraph based visualization
URDF parser
The listed features is combined to a simulation environment.
The library is implemented in Eigen, all algorithms are templated and can
be used with automatic differentiation. Simulation and on-line dynamics
are used in
various systems throughout the institute. The library is also the basis for
my motion planning works.
EMG based Tele-operation
Trajectory Optimization for Series Elastic Joints (SEA)
 .
.
 The library
implements the basic building blocks for robotics research:
The library
implements the basic building blocks for robotics research:
