IROS 2017:
Generation of Locomotion Trajectories for Series Elastic and Viscoelastic Bipedal Robots
A Werner, W Turlej and C Ott
IROS 2017:
Generation of Locomotion Trajectories for Series Elastic and Viscoelastic Bipedal Robots
A Werner, W Turlej and C Ott




 Still quite high sample density required
Still quite high sample density required
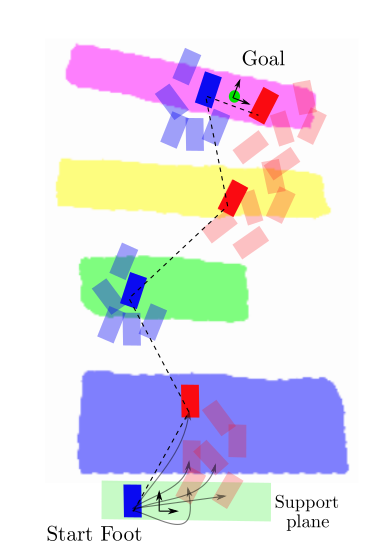
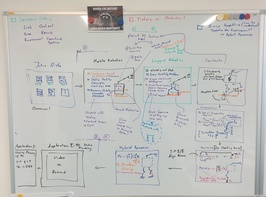
 IROS 2015: Generalization of optimal motion trajectories for bipedal walking -
A Werner, D Trautmann, D Lee, R Lampariello
IROS 2015: Generalization of optimal motion trajectories for bipedal walking -
A Werner, D Trautmann, D Lee, R Lampariello


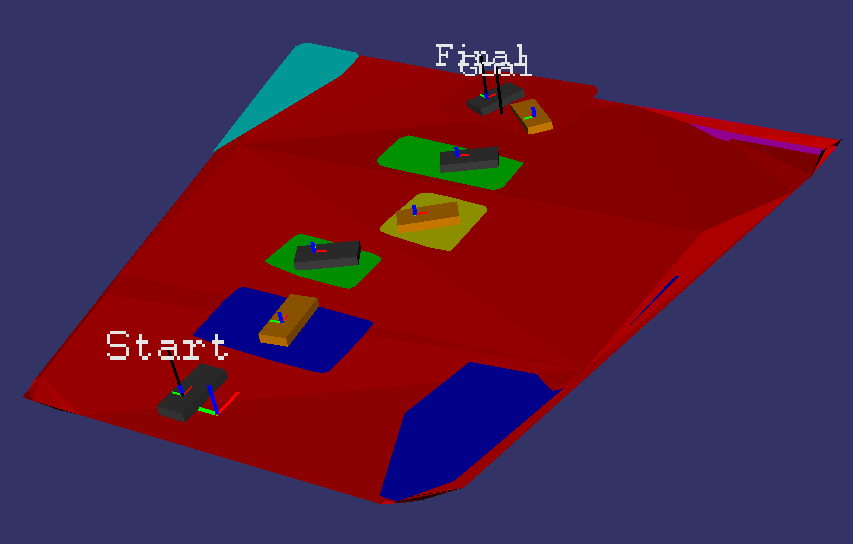
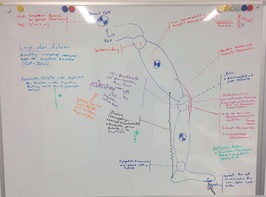
 IROS 2016: Multi-contact planning and control for a torque-controlled humanoid robot - Alexander Werner, Bernd Henze, Diego A Rodriguez, Jonathan Gabaret, Oliver Porges, Máximo A Roa
IROS 2016: Multi-contact planning and control for a torque-controlled humanoid robot - Alexander Werner, Bernd Henze, Diego A Rodriguez, Jonathan Gabaret, Oliver Porges, Máximo A Roa